Robots mobiles indoor
Les robots mobiles indoor sont des machines capables de se déplacer dans un espace intérieur pour effectuer une tâche spécifique. Ces robots sont utilisés dans différents domaines, tels que la logistique, la surveillance, l'inspection et la recherche.
Robots mobiles indoor AgileX
AgileX Robotics a développé une large gamme de robots mobiles indoor. Parmi eux, on retrouve :
- Le Ranger Mini 2.0 est un UGV omndirectionnel aux 4 modes de déplacement, il peut gérer diverses missions en intérieur et en extérieur.
- Le Tracer 2.0 est un robot mobile autonome de 15 cm de haut dédié à la navigation en intérieur, il peut porter des charges jusqu'à 150 kg.
- Le Limo est un robot open-source dédié au développement d'IA et d'applications de navigation autonome.
Robots mobiles indoor Clearpath Robotics
Les robots Ridgeback, Boxer et Dingo de Clearpath Robotics sont tous des robots mobiles indoor dotés de fonctionnalités avancées :
- Le Ridgeback est un robot de manutention autonome, capable de transporter des charges allant jusqu'à 100 kg sur une distance de 15 km à une vitesse maximale de 1 m/s.
- Le Boxer est une plateforme robotique indoor de 75 cm de long pouvant atteindre une vitesse de 2m/s et porter jusqu'à 100 kg.
- Le Dingo est un robot mobile compact, léger et facile à adapter, il offre deux possibilités de conduite : diférentielle ou omnidirectionnelle.
TurtleBot : un robot mobile complet pour l'éducation et la recherche
Le Turtlebot est un robot mobile indoor open source. Il est équipé d'un ensemble de capteurs, notamment des LiDAR et des caméras, pour naviguer et percevoir son environnement. Le Turtlebot peut être programmé avec une variété d'algorithmes pour effectuer des tâches spécifiques, comme la cartographie ou la reconnaissance d'objets. Il est également équipé d'une plate-forme de charge utile pour transporter des équipements supplémentaires.
Robots mobiles indoor Husarion
Les robots mobiles indoor ROSBOT de Husarion sont des plateformes robotiques autonomes conçues pour l'éducation, la recherche et le prototypage.
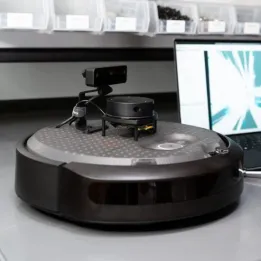
- Le ROSBOT 3 repose sur une Raspberry Pi 5, un LiDAR SLAMTEC, une caméra Luxonis OAK-D Lite ou Pro, et propose une intégration native avec ROS 2 Jazzy. Il est prêt à l'emploi avec des scénarios de navigation et de SLAM préconfigurés.
- Le ROSBOT XL, plus robuste, offre une charge utile jusqu’à 10 kg, des roues motrices puissantes et des options de personnalisation avancées (bras robotique, téléprésence, navigation autonome). Tous les modèles bénéficient d’une documentation complète et de packages ROS prêts à l’emploi.
















































Découvrez le Robot mobile ROSbot XL d’Husarion, une plateforme robotique mobile autonome conçue pour la Recherche et le Développement, le prototypage rapide et la création de robots sur mesure pour une variété d'applications en intérieur.



Le robot mobile du TurtleBot 4 est construit sur le robot éducatif iRobot® Create® 3 qui fournit un IMU, un capteur optique de suivi du sol et des encodeurs de roue pour un positionnement et une localisation précis.


Avec son châssis omnidirectionnel Drive-by-wire, le Ranger Mini 3.0 d’AgileX est un robot mobile aux multiples modes de déplacement. ll est capable de gérer diverses missions en intérieur et en extérieur.


Robuste et compact, le robot mobile Boxer est une plateforme indoor dédiée au développement de solutions et de technologies robotiques. 100 % ROS, il offre un vaste éventail de possibilités aux chercheurs et aux designers.


Le Tracer 2.0 est une base robotique différentielle à deux roues motrices, conçue pour les environnements de recherche avancée et les applications industrielles. Il combine vitesse, puissance, endurance et ouverture au développement pour répondre aux besoins des chercheurs et des ingénieurs.


Le robot mobile du TurtleBot 4 est construit sur le robot éducatif iRobot® Create® 3 qui fournit un IMU, un capteur optique de suivi du sol et des encodeurs de roue pour un positionnement et une localisation précis.


Le kit de développement pour AGV et AMR basé sur la technologie SWD Safety Wheel Drive fournit une plateforme prête à l’emploi pour concevoir, tester et valider des robots mobiles autonomes en environnement de recherche, académique ou industriel.

Le robot mobile Dingo est une plateforme robotique conçue par Clearpath pour les applications indoor menées dans l’enseignement ou la recherche. Il est disponible en deux version : conduite différentielle ou omnidirectionnelle.


La roue motrice sécuritaire SWD 125 est conçue pour les robots mobiles AGV/AMR, les robots logistiques et les plateformes de recherche nécessitant une solution de traction compacte, contrôlée et conforme aux exigences de sécurité fonctionnelle.


Découvrez LIMO, un robot mobile conçu sur la base d'une plateforme mobile Agilex. Cette structure robotisée évolutive est dédiée au développement d'intelligence artificielle. LIMO est disponible en 2 versions : LIMO et LIMO PRO (compatible ROS 2).

TurtleBot3 Waffle Pi est une plateforme ROS abordable et extensible, idéale pour l’apprentissage et la recherche en robotique mobile. Elle est basée sur un châssis compact avec servomoteurs Dynamixel, Raspberry Pi 4, LiDAR et centrale inertielle,


Le robot Ridgeback est une plateforme robotique intérieure omnidirectionnelle de taille intermédiaire capable de déplacer précisément de fortes charges dans un environnement contraint. Le robot est complètement intégré, il est fourni avec des télémètres laser avant et arrière et possède également une centrale inertielle. Le robot Ridgeback propose une intégration native avec ROS et Gazebo.


ROSbot 3 et le ROSbot 3 PRO sont des plateformes robotiques mobiles d'intérieur, spécialement conçues pour la recherche et l'éducation.


Le RB-THERON est une solution modulaire basée sur l’architecture ROS, idéale pour améliorer l’efficacité des processus logistiques en intérieur.


Le Robot Ranger 4WS4WD est doté d'une configuration à quatre roues motrices et à quatre roues directrices, ce qui lui permet de se déplacer facilement sur des terrains accidentés et des surfaces inégales.

La base mobile d'éducation Turtlebot 3 Burger est une plateforme robotique mobile légère, compacte, économique et personnalisable à volonté. Elle offre une solution parfaite à tous ceux qui recherchent un support ludique pour leurs ateliers de programmation robotique, mais aussi aux apprentis roboticiens, et aux concepteurs et designers.

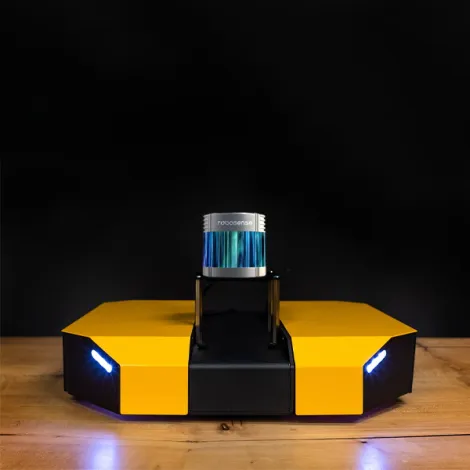
Le robot mobile indoor Apollo 2.0 de Slamtec est une plateforme autonome de taille moyenne, pensée pour les applications robotiques avancées : navigation autonome, livraisons multi-étages, évitement intelligent d’obstacles et gestion multi-robots.


Le LIMO COBOT est une composition du LIMO PRO, une plateforme de développement et d'apprentissage ROS, équipé d’un bras robotique Mycobot 280.


Le RB-THERON+ est un robot manipulateur mobile conçu pour des usages R&D et des opérations de manipulation en intérieur, adapté aux laboratoires, universités, sites industriels et zones logistiques avec des contraintes d’espace.


Une plate-forme robotique télécommandée open source et intégrale, bénéficiant d’un matériel amélioré pour des performances optimales.


Ce support de caméra vous permet de fixer une caméra Raspberry Pi à un robot TurtleBot 3 ou au contrôleur TurtleBot3 OpenManipulator.

Quelque chose à rajouter sur votre TurtleBot3 ? Restez prévoyants avec la plaque IPL-01 pour TurtleBot Waffle !


Les chenilles ICT-01 pour TurtleBot3 vous permettent de changer facilement et rapidement les pièces de chenille usagées de votre robot. Et c'est reparti pour un tour !

Exigez des roues solides et résistantes pour votre TurtleBot3 : le lot TB3 Wheel/Tire Set-ISW-01 ira comme un gant à vos servomoteurs Dynamixel !